

What is a Servo Motor?
A servo motor is a rotational or translational motor to which power is supplied by a servo amplifier and serves to apply torque or force to a mechanical system, such as an actuator or brake. Servo motors allow for precise control in terms of angular position, acceleration, and velocity. This type of motor is associated with a closed-loop control system. A closed-loop control system considers the current output and alters it to the desired condition. The control action in these systems is based on the output of the motor. It uses a positive feedback system to control the motion and final position of the shaft.
There are two types of current flow in these motors – AC and DC. AC servo motors can handle higher current surges and are thus more commonly found in heavy industrial machinery. ISL’s DC Servo Motors are best suited for smaller applications and have excellent control-ability and feedback. In a servo motor speed is determined by the frequency of the applied voltage and the number of magnetic poles.
Servo motors offer versatility in the manufacturing environment. Common applications include Collaborative robotics, Conveyor belts, Automatic door openers, CNC turning/milling machines, and Automation systems. Discover how incorporating a servo motor into your application will help increase it’s efficiency.
Browse our Servo Motor Database
Servo Motor Construction
The following figure shows the construction of a standard servo motor. ISL Products offers a wide variety of servo motors to accommodate different industrial applications.

The servo motor consists of two winding stator and rotor windings. The stator winding is wound on the stationary part of the motor, and this winding is also called field winding of the motor. The rotor winding is wound on the rotating part of the motor and this winding is also called the armature winding of the motor. The motor consists of two bearings on the front and backside for the free movement of the shaft. The encoder has the approximate sensor for determining the rotational speed and revolution per minute of the motor. Our Motor Selection Guide will help you identify your requirements.
Three Basic Types
Servo motors come in many sizes and in three basic types. The three types include positional rotation, continuous rotation, and linear.
Positional Rotation servos rotate 180 degrees. They also have stops in the gear mechanism to protect the output shaft from over-rotating.
A Continuous Rotation servo motor is a servo that does not have a limit on its range of motion. Instead of having the input signal determine which position the servo should rotate to, the continuous rotation servo relates the input to the speed of the output and direction. The limitless motion of these motors enables them to move in both CW, and CCW directions.
Linear Servos use a rack and pinion mechanism to change their output. The rack and pinion converts rotary motion to linear motion.
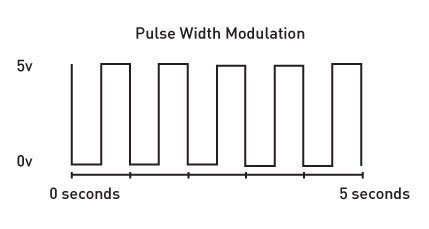
Controlling Servo Motors with PWM
Pulse width modulation (PWM) sends an electric pulse of variable width to the motor. With PWM there is a minimum pulse, maximum pulse, and a repetition rate. The rotor will turn to the desired position based on the duration of the pulse. When servos are commanded to move, they move to the position and hold the position.
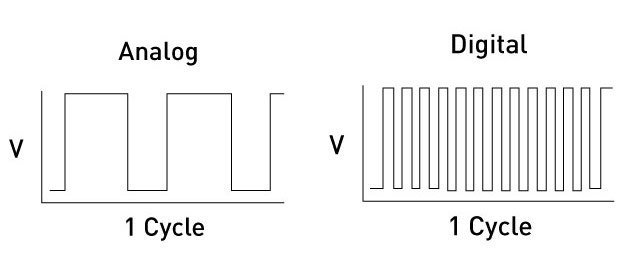
Analog and digital servo motors look exactly the same. The difference is in the way they signal and process information.
Analog Servos operate based on voltage signals that come through the pulse width modulation (PWM). When an analog servo is at rest, the PWM is essentially off unless you transmit some action. Producing torque from the resting mode makes the initial reaction time sluggish. This delay in torque isn’t ideal for advanced applications.
Digital Servos use a small microprocessor to receive and direct action at high-frequency voltage pulses. The digital servo sends nearly six times the amount of pulses an analog signal does. These faster pulses provide consistent torque for quicker and smoother response times. It’s important to note the faster pulses require more power emission from the motor.
Unique Features & Advantages
- Precision– Servo motors entail highly precise operation, hence why they are commonly used in CNC machinery for movement of slide axis.
- Speed– Servo motors offer high speed rotation, and more torque in a small package.
- Encoder– Translates rotary or linear motion to a digital signal.
- Versatility– Wide range of use for servo motors in a variety of applications.
- Closed Loop- Servo motors use feedback signal to control the system.
