
DC Servo Motors



ISL Products manufactures a wide range of DC servo motors for applications requiring optimal control with constant position feedback. Our servo motors offer incredible accuracy and positioning and we offer a variety of configurations. We offer solutions ranging from analog, positional rotation servos (hobby servos) to precision digital brushed and brushless servos utilizing a spur, worm or planetary gearbox for more complex applications. Our engineers will work with you to provide a solution that meets your application requirements.
DC Servo Motors are unique because they use encoders to provide constant positional feedback, allowing them to operate at varying speeds and generate a broad torque range, compared to a stepper motor. They operate on a closed-loop system with either an analog or digital input signal representing the position command for the output shaft. You can use Pulse Width Modulation (PWM) to control our DC servo motors for optimal precision.
Shop Popular Models




Types of Rotary Encoders
A rotary encoder is a feedback mechanism used for precise control of a DC electric motor. It is a sensor that converts the angular position of the motor shaft to a pulsed output signal that can be used to determine rotor position and speed. With a two-channel encoder, you can also determine the direction of the motor rotation.
There are two main types of rotary encoders, incremental and absolute encoders. Absolute encoders relay the absolute position of the motor’s output shaft where an incremental encoder has a fixed number of output pulses per one single revolution of the motor.
An advantage of an absolute encoder is that you can always determine the absolute position of the output shaft even if power was lost and regained. An incremental encoder must need an indexed home position reset with each use. Both encoder types come in magnetic and optical configurations.
Magnetic Encoders
Magnetic encoders utilize magnetic poles and hall sensors to output square waves in response to the motor’s rotation. There is a disc consisting of several magnetic poles that is connected to the rear shaft of the motor. This disc is measured by hall sensors in either a single channel (one sensor) or a dual channel (two sensors) layout. As the magnet rotates, the hall sensors count the magnetic poles, in turn providing a resolution. This encoder resolution is generally portrayed in PPR (pulses per revolution) or CPR (counts per revolution). Hall sensors can only measure north or south magnetic fields, so a dual channel layout is recommended.
As the north and south poles of the magnetic ring rotate and interact with their corresponding hall sensor, the encoder outputs a square wave pulse in response to the change in magnet field strength. Using magnet rings with higher pole counts results in greater resolution and precision, but It is difficult to fit many magnetic poles on a small magnetic ring. Therefore resolution is more limited than other encoder options.
However, magnetic encoders tend to be cheaper, more widely available, and can also be more forgiving when it comes to foreign particles, shocks, minor misalignment, vibrations, and other hazards. These sensors typically run at a different voltage than the motor they are attached to, so use a power supply that can provide multiple voltages. Usually 3.3VDC~12VDC.

Popular Models Available:
MOT-IG32PGM1:264E /PGM-32P-12-264-23-01E – This model is 32mm in diameter with a 2 channel, 7PPR incremental magnetic encoder. Rated operating conditions: 12VDC / 21 rpm / 12 kg.cm / 1 A.
MOT-I-81566-E / SGM-SG37-12-630-10-CE – This model is 37mm in diameter with a 2 channel, 7PPR incremental magnetic encoder. Rated operating conditions: 12VDC / 8 rpm / 18 kg.cm / 290 mA.
MOT-I-81584-IG38E /PGM-38P-24-51-125-02E – This model is 38mm in diameter with a 1 channel, 7PPR incremental magnetic encoder. Rated operating conditions: 24VDC/ 103 rpm / 15 kg.cm / 1.75 A.
Find a Solution Shop at Digi-Key
Optical Encoders
Optical encoders operate in a very similar manner. Instead of magnetic poles and hall sensors, they utilize a combination of a small LED light, optical sensor(s), and a slotted disc. As the slots of the rotor disc pass over the light, the optical sensor sees the signal and an output is generated from the encoder.
Optical encoders also come in single and dual channel configurations, with dual channel options being able to measure half slot rotations and directionality. Optical encoders tend to have higher available resolution because it is much easier to fit slots on a disc than it is to fit magnetic poles into the same area.
These encoders are usually pricier because of the cost of LED’s and optical sensors. Optical sensors are also more prone to interference from dust and particulates, as well as vibrations and misalignment.

Servo Motor Speed Controllers
Speed controllers are an incredibly useful tool for managing servo motors. ISL offers a plug-and-play brushed dc motor controller, designed for ease of use with our dc servo motors. Simply plug the connector into the port on the controller for control and motor feedback. These devices simplify the process and reduce the amount of programming needed in comparison to an Arduino controller.
By using a potentiometer, you can dial in the speed of the motor and monitor it with the encoder connectors. There are also ports to accept a pulse width modulation (PWM) signal for those who prefer digital speed control. You can also toggle the motor’s ON/OFF function via brake control and direction of rotation. There is also a lower power rail for running lights, or other accessory electronics.
Our MOT-DRV-S driver does all of this, while also having removable terminal blocks, multiple mounting options, and an integrated JST PH-6 connector. The perfect solution to simplify your servo integration.
Popular Models Available:
MOT-DRV-S – This brushed dc servo motor controller is suited for an input voltage range of 10VDC – 30VDC. Max current rating is 5A. Plug & Play with most of our dc servo motors.
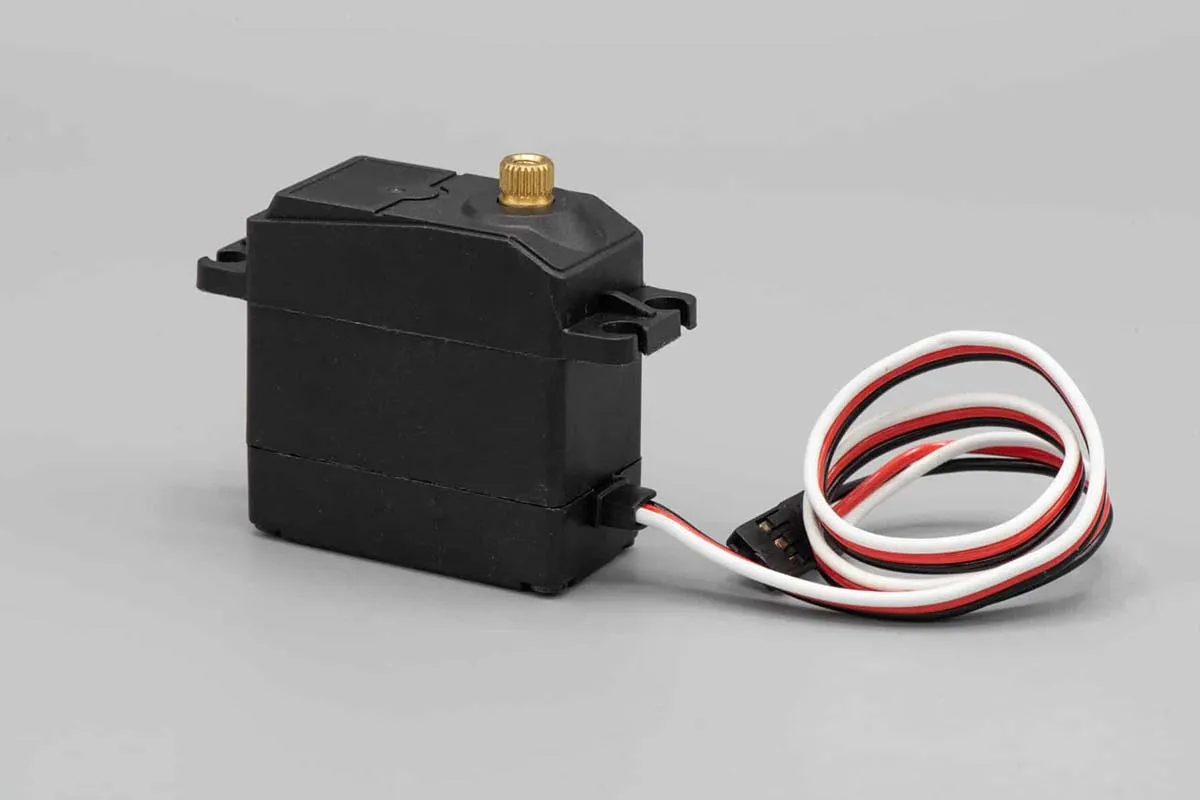
RC Servos
This servo drive option is an all-in-one solution. The controllability and feedback make programming the motor and executing its desired task very intuitive. These motors are extremely popular in the RC world (thus the name) to control the steering of RC cars, boats, planes, etc. They can be configured in a way where the movement is fixed as well, so if your application only needs a 60°, 90°, 120° or 180° turn, the motor can be pre-configured to repeat that motion precisely and effectively.
They can also be configured for continuous rotation. There is usually a 3-pin connection for these motors; power, ground, and PWM. The PWM does all the controlling through the built in processor and feedback mechanism, typically a PCB with various components. When connected to a control board, such as an Arduino or Raspberry Pi, you can program specific and precise movements from the servo to carry out tasks. The specifications for these motors are expressed differently than other DC motors. The speeds are usually expressed in a time per 60° of rotation and torque is dependent on the voltage given to the motor.
Types of Servo Motors
Brush DC Motor
Most of the electric motor offerings from ISL Products can be converted into servo motors. Our coreless motors are a great option for adding encoders. These lightweight motors with a high max speed and a compact size are increasingly popular in recent years. Adding an encoder to a coreless motor makes sense in robotics applications where weight and size are top priorities.
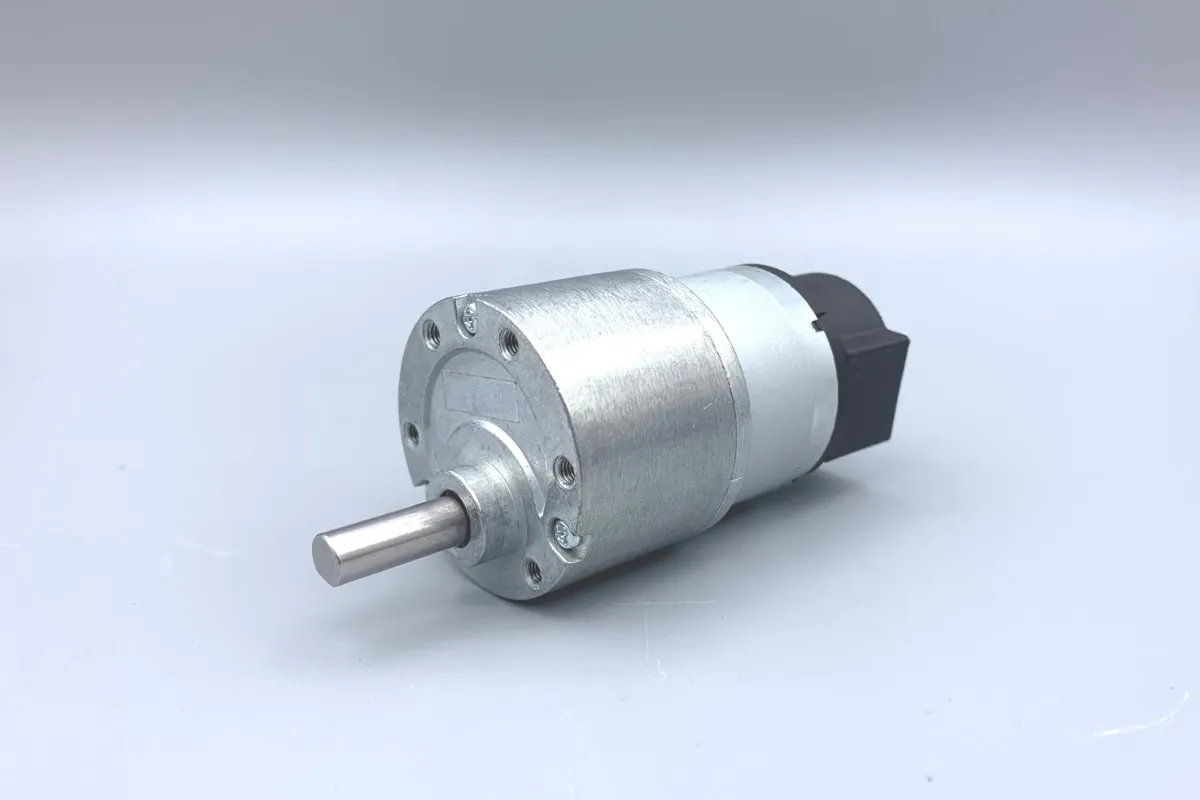
DC Brush Gear Motor
Gear Motors are a great way to provide a lot of torque from a relatively small package. Both planetary and spur gearboxes can convert speed into torque, but how do they interact with the encoder?
A gearmotor with an encoder allows for even greater precision and higher resolution when observing via the gearbox output shaft. When an encoder is used on a gear motor, the encoder counts the motors rotations. Since the gear box is a further reduction of the motor’s speed, it acts as a resolution multiplier. For example, if you have a motor with a 5 PPR encoder and a 10:1 reduction gearbox, the final resolution from the gearbox output shaft would be 50 PPR (Encoder PPR x Gearbox Reduction).
There is one drawback to this, backlash. Backlash, or play, is a part of most gearboxes. While designs like cycloidal, planetary, and worm gearboxes are very good at avoiding this problem, spur gear boxes tend to let the backlash between each gear multiply together, creating a bigger problem. Under a continuous load this isn’t a problem, but it is something to consider if your application switches directions regularly and requires exact precision.
Brushless DC Motor
Brushless motors can also receive the servo treatment. BLDC servo performance is held to the same high standard of our brush motor servo motors, even with the high speed thresholds normal of bldc motors. Since there are no wearing parts while converting the electrical energy into mechanical energy, BLDC Motors have a longer service life than their brushed counterparts.
It is important to remember that bldc motors require a control circuit, or driver, to operate and that not every BLDC driver is designed to work with rotary encoders.
Technological advances in both precision and performance have resulted in increased operational life, higher output torque, and enhanced precision. To learn more about these contact an ISL Products Applications Engineer. You can call, email, or use LiveChat to talk with our knowledgeable staff today!
Check out our Stepper Motor page for other precision movement options.
